Robot odometry large drift #142
Labels
bug
Something isn't working
Comments
|
This kind of make sense and is expected, no? For the Create 2 (that's all I have), if I performed this maneuver, I will definitely observe For at least my current investigation, I want to add more noise to the |
# for free
to join this conversation on GitHub.
Already have an account?
# to comment
Describe the bug
Doing very simple and short maneuvers results in a huge drift in the dead reckoning pose wrt the ground truth one.
To Reproduce
Run simulation and then command
Where the forward translation is ~ 1 meter, is enough to have the robot pose drift a lot.
This can be easily observed thanks to another currently open bug, where Gazebo uses ground truth pose, but rviz does not
#75
Screenshots
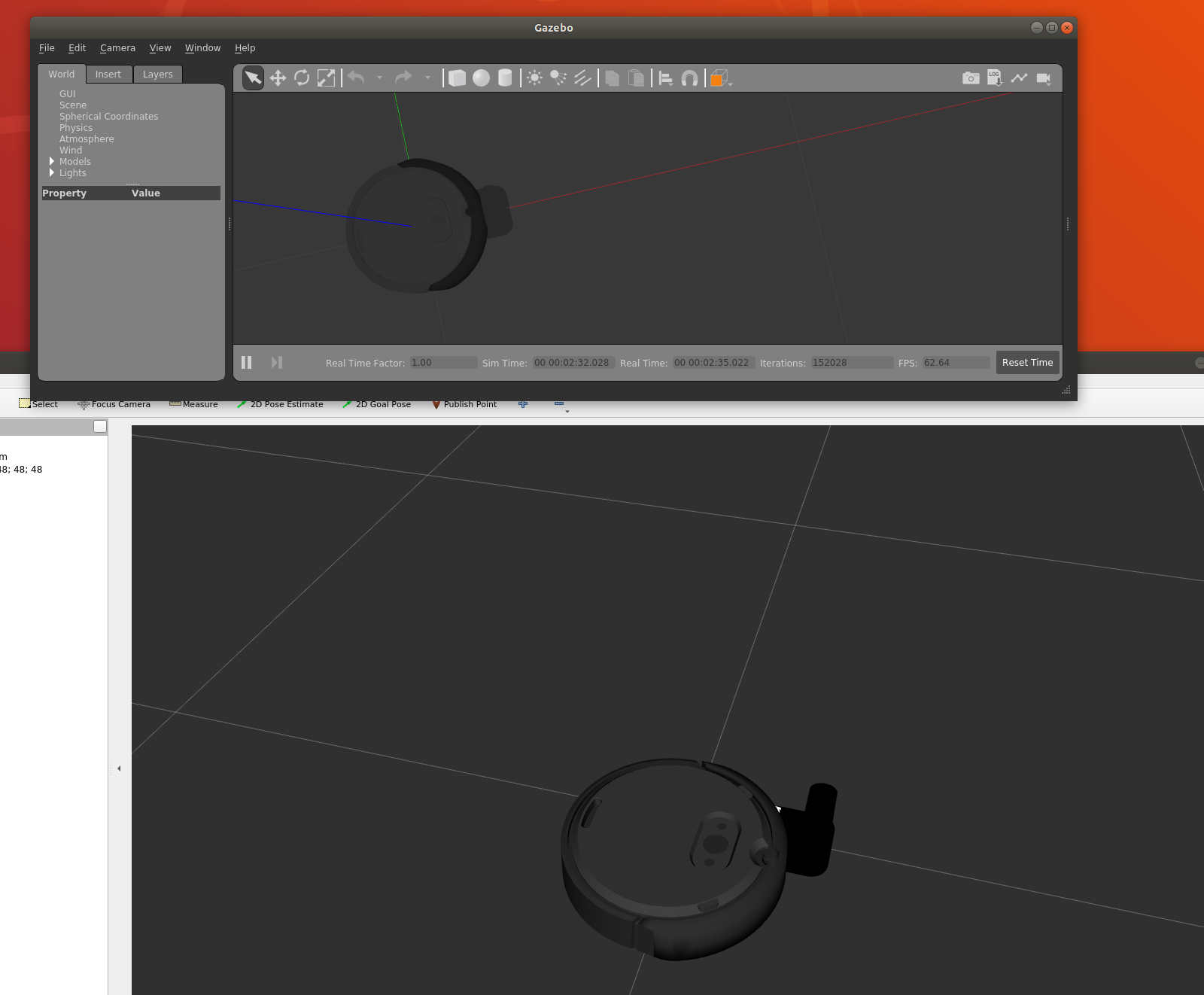
At the end of the aforementioned maneuver, the robot appears docked in gazebo, but it is not in Rviz
The text was updated successfully, but these errors were encountered: