# cybergear_m5
M5 stack library for cybergear
*"Remember, with great torque comes great responsibility."*
## Supported framework
* Arduino for ESP32
## Supported device (ESP32)
* M5Stack Basic V2.7
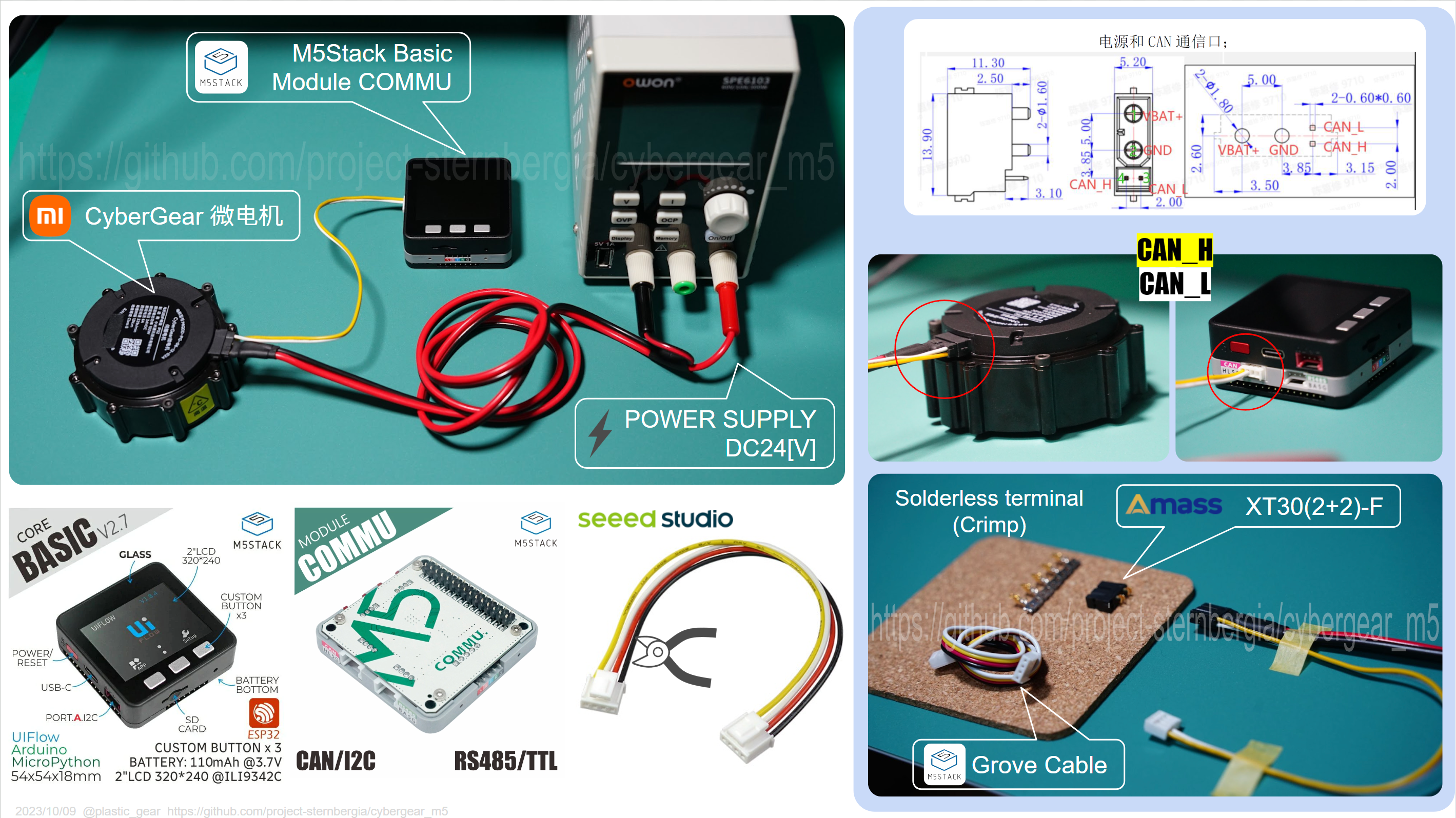
## H/W Components (MCP2515)
* [Xiaomi Cybergear](https://www.mi.com/cyber-gear)
* [M5Stack Basic V2.7](https://shop.m5stack.com/collections/m5-controllers/products/esp32-basic-core-lot-development-kit-v2-7)
* [M5Stack Commu module \[M001\]](https://shop.m5stack.com/products/commu-module)
* [XT30(2+2)-F](https://www.china-amass.com/product/contain/1Yf5h7G4u1927079)
* [Grove Cable](https://www.seeedstudio.com/Grove-Universal-4-Pin-Buckled-20cm-Cable-5-PCs-pack.html)
## H/W Components (ESP32 + PWRCAN)
* [Xiaomi Cybergear](https://www.mi.com/cyber-gear)
* [M5Stack Basic V2.7](https://shop.m5stack.com/collections/m5-controllers/products/esp32-basic-core-lot-development-kit-v2-7)
* [PWRCAN 13.2 Module with Isolated 2-Ch CAN & 1-Ch RS485](https://shop.m5stack.com/products/pwrcan-13-2-module-with-isolated-2-ch-can-1-ch-rs485)

## H/W Components (ESP32 + CAN Transceiver Unit)
* [Xiaomi Cybergear](https://www.mi.com/cyber-gear)
* [M5Stack Basic V2.7](https://shop.m5stack.com/collections/m5-controllers/products/esp32-basic-core-lot-development-kit-v2-7)
* [LAN Module W5500 with PoE V12](https://shop.m5stack.com/products/lan-module-w5500-with-poe-v12) or [CANBus Unit(CA-IS3050G)](https://shop.m5stack.com/products/canbus-unitca-is3050g)
* [XT30(2+2)-F](https://www.china-amass.com/product/contain/1Yf5h7G4u1927079)
* [Grove Cable](https://www.seeedstudio.com/Grove-Universal-4-Pin-Buckled-20cm-Cable-5-PCs-pack.html)
## How to use Official GUI tool
This software requires a specific CAN to USB module.
The official documentation recommends YourCee's USB to CAN module, which supports the serial protocol with a frame header of 41 54 and frame tail of 0D 0A, but this is not readily available, so we searched Aliexpress for an alternative.
※ Note that this will not work for general modules.
Tested(for reference):
* [CAN to USB module](https://ja.aliexpress.com/item/1005004296661528.html)
## Recommended pre-crimped cables
* [XT30(2+2) Cable](https://ja.aliexpress.com/item/1005006046478152.html)
## How to run sample
### Arduino IDE
1. Clone [MCP_CAN_LIB](https://github.com/coryjfowler/MCP_CAN_lib) and [cygergear_m5](https://github.com/project-sternbergia/cybergear_m5) to Arduino Library directory.
```bash
cd ~/Arduino/libraries
git clone https://github.com/coryjfowler/MCP_CAN_lib.git
git clone https://github.com/Locoduino/RingBuffer.git
git clone git@github.com:project-sternbergia/arduino-CAN.git
git clone https://github.com/project-sternbergia/cybergear_m5.git
```
2. Open [cybergear_m5/examples/control_mode_example.ino](https://github.com/project-sternbergia/cybergear_m5/blob/main/examples/control_mode_example.ino) with Arduino IDE
Put this file in the same folder as control_mode_example.ino (for Arduino IDE)
If you want to use ESP32_CAN library, please commentin [this lines](https://github.com/project-sternbergia/cybergear_m5/blob/bca92165be36318d6ae63f8e38ba0b4d76887dc3/examples/control_mode_example/control_mode_example.ino#L6-L7).
4. Build and write firmware to M5Stack
## Sample Code
### control_mode_example.ino
Check cybergear behaviour using M5 stack.
* Middle Button - Change Control Mode (Position Mode -> Speed Mode -> Current Mode)
* Right Button - Increase control value
* Left Button - Decrease control value

### cybergear_bilateral.ino
This example use two cybergears for leader and follower.
Before you test this example, please change cybergear can id as follows.
After that write [cybergear_m5/examples/cybergear_bilateral.ino](https://github.com/project-sternbergia/cybergear_m5/blob/main/examples/cybergear_bilateral.ino) to m5 stack throughout Arduino IDE.
* leader cybergear : 0x7F
* follower cybergear : 0x7E

## References
* [Xiaomi Cybergear 微电机使用说明书](https://web.vip.miui.com/page/info/mio/mio/detail?postId=40233100)
## LICENSE
MIT