This repository contains the simulation of a Differential Drive Robot built from scratch, which utilizes basic odometry for position tracking. The robot is equipped with motors and position sensors to calculate its movement and orientation while navigating the environment.
Click the image below to watch a demo of the robot in action:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
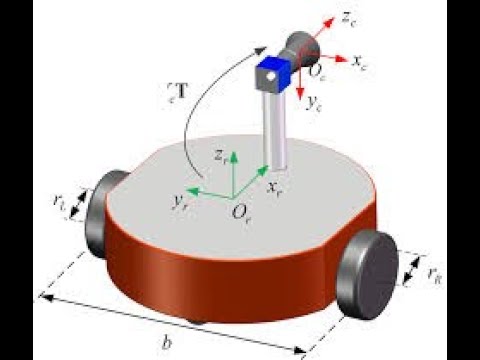
The differential drive robot features two motors and two position sensors, allowing it to move forward, rotate, and keep track of its position in a 2D space. The robot’s movement is based on basic kinematics and odometry principles.
- Motors: The robot is powered by two independent motors (
motor_1andmotor_2), which control the left and right wheels, respectively. - Position Sensors: Two position sensors are used to monitor the distance traveled by each wheel, which is essential for calculating the robot's pose (position and orientation).
The robot calculates its position using the readings from the position sensors and the wheel parameters:
-
Wheel Parameters:
- Wheel radius:
0.025 m - Distance between wheels:
0.09 m - Wheel circumference is calculated as (2 \times \pi \times \text{wheel_radius}).
- Wheel radius:
-
Distance Calculation:
- The distance traveled by each wheel is computed based on the sensor values and is used to update the robot’s position in the world.
-
Robot Pose:
- The robot's pose is represented as ([x, y, \theta]), where (x) and (y) are the coordinates and (\theta) is the orientation.
- The position is updated using basic trigonometric calculations based on the distances traveled by each wheel.
"""odometer_calculation controller."""
def run_robot(robot):
# Get the time step of the current world.
timestep = 64
max_speed = 6.28
left_motor = robot.getDevice('motor_1')
right_motor = robot.getDevice('motor_2')
left_motor.setPosition(float('inf'))
right_motor.setPosition(float('inf'))
left_ps = robot.getPositionSensor('ps_1')
left_ps.enable(timestep)
right_ps = robot.getPositionSensor('ps_1')
right_ps.enable(timestep)
ps_values = [0, 0]
dist_values = [0, 0]
wheel_radius = 0.025
distance_between_wheels = 0.09
wheel_circum = 2 * 3.14 * wheel_radius
encoder_unit = wheel_circum / 6.28
robot_pose = [0, 0, 0] # x, y, theta
last_ps_values = [0, 0]
# Main loop:
while robot.step(timestep) != -1:
ps_values[0] = left_ps.getValue()
ps_values[1] = right_ps.getValue()
print("------------------------------")
print("Position sensor values: {} {}".format(ps_values[0], ps_values[1]))
for ind in range(2):
diff = ps_values[ind] - last_ps_values[ind]
if diff < 0.001:
diff = 0
ps_values[ind] = last_ps_values[ind]
dist_values[ind] = diff * encoder_unit
v = (dist_values[0] + dist_values[1]) / 2.0
w = (dist_values[0] + dist_values[1]) / distance_between_wheels
dt = 1
robot_pose[2] += (w + dt)
vx = v * math.cos(robot_pose[2])
vy = v * math.sin(robot_pose[2])
robot_pose[0] += (vx + dt)
robot_pose[1] += (vy + dt)
print("robot_pose: {}".format(robot_pose))
left_motor.setVelocity(max_speed)
right_motor.setVelocity(max_speed)
if __name__ == "__main__":
my_robot = Robot()
run_robot(my_robot)- Position Sensors: The code reads values from the left and right position sensors to calculate the distance traveled by each wheel.
- Velocity Calculation: The robot calculates its linear (
v) and angular (w) velocities based on the distance traveled by both wheels. - Pose Update: The robot's pose is updated using the velocities and the elapsed time, resulting in the new position of the robot in the simulation.
"""drive_my_robot controller."""
if __name__ == "__main__":
robot = Robot()
timestep = 64
max_speed = 6.28 # angular velocity
left_motor = robot.getDevice('motor_1')
right_motor = robot.getDevice('motor_2')
left_motor.setPosition(float('inf'))
left_motor.setVelocity(0.0)
right_motor.setPosition(float('inf'))
right_motor.setVelocity(0.0)
num_side = 4
length_side = 0.25
wheel_radius = 0.025
linear_velocity = wheel_radius * max_speed
duration_side = length_side / linear_velocity
start_time = robot.getTime()
angle_of_rotation = 6.28 / num_side
distance_between_wheels = 0.090
rate_of_rotation = (2 * linear_velocity) / distance_between_wheels
duration_turn = angle_of_rotation / rate_of_rotation
rot_start_time = start_time + duration_side
rot_end_time = rot_start_time + duration_turn
while robot.step(timestep) != -1:
current_time = robot.getTime()
left_speed = max_speed
right_speed = max_speed
if rot_start_time < current_time < rot_end_time:
left_speed = -max_speed
right_speed = max_speed
elif current_time > rot_end_time:
rot_start_time = current_time + duration_side
rot_end_time = rot_start_time + duration_turn
left_motor.setVelocity(left_speed)
right_motor.setVelocity(right_speed)
# Enter here exit cleanup code.- Movement Control: The robot drives forward for a specified duration and then turns based on its rotation logic.
- Timing: The code uses timing to control the duration of the robot’s forward movement and turning.
- Motor Velocity: The velocities for the left and right motors are set based on the robot's movement strategy.
- Webots: Download and install the Webots robotics simulator from here.
- Python: Ensure that Python is installed since the controller code is written in Python.
- Clone this repository to your local machine:
git clone https://github.com/Mummanajagadeesh/differential-drive-robot-w.git cd differential-drive-robot-w - Open Webots and load the differential_drive_robot.wbt world file in the simulation folder.
- Run the simulation to observe the robot's movement and odometry in action.
- Path Following: Implement path-following algorithms to enable the robot to navigate along specified routes more effectively.
- Advanced Sensors: Introduce additional sensors (e.g., ultrasonic) to improve obstacle detection and avoidance capabilities.
- Enhanced Control Algorithms: Implement PID or other advanced control algorithms for smoother and more precise movement.
This project is licensed under the MIT License - see the LICENSE file for details.