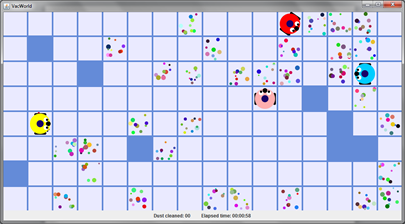
The vacuum environment is a 2-dimensional grid world, populated with fixed obstacles, dust, and vacuum cleaning robots called VacBots. The VacBots are controllable entities that can be controlled by agents. Their task is to move around the grid, avoiding the obstacles, and finding and cleaning the colour-ful dust.
In the default configuration, the size of the world is 16 x 8 squares; there are 8 randomly-placed obstacles, 32 random dusty squares, and 4 randomly-placed VacBots. Dust, once cleaned, does not regenerate. This default configuration can be changed by editing the file conf/ita.conf, which also includes documentation for each configuration option.
Decco, Harry, Henry, Lloyd, Keano, Stevo, Benjy, and Darth are the names of available VacBots in the Vacuum World. Note that, in the default configuration, only the first four of these are available.
VacBots can turn, move around the grid, clean dust, and flash their warning lights:
- move(Identifier): Moves the VacBot one square in the specified direction, turning it first if necessary. Valid directions can be absolute (north, south, east, or west) or relative (forward, left, right, or *back). The VacBot carries out the requested move on a best-effort basis. If the moving VacBot meets another VacBot, a permanent obstacle, or the edge of the grid, it halts.
- move(Identifier, Numeral): Moves the VacBot in the specified direction, for the specified distance, turning it first if necessary. Valid directions are specified as for the move action above. The distance is a positive integer representing the number of squares to be moved; a distance value of 0 can be used to turn the entity without moving. The VacBot carries out the requested move on a best-effort basis. If the moving VacBot meets another VacBot, a permanent obstacle, or the edge of the grid, it halts.
- light(Identifier): Turns the warning light on or off.
- clean: Cleans the square currently occupied by the VacBot, if it is dusty. If the square is already clean, this action returns immediately.
VacBots receive the following percepts:
- location(Numeral, Numeral): The VacBot’s current location on the grid, in (X,Y) coordinates. The square in the top left corner is numbered (0,0). This percept is only available when the VacBot is not moving between squares.
- direction(Identifier): The VacBot’s current absolute direction, one of north, south, east, or west. This percept is only available when the VacBot is not turning or cleaning.
- light(Identifier): The status of the Vacbot’s light, either on or off.
- square(Identifier squareName, Identifier squareContents): Six instances of this percept represent the VacBot’s field of vision. The square name is one of left, forwardLeft, forward, forwardRight, right, or here. The square contents is one of obstacle, vac, dust, or empty. Note that if the VacBot perceives another VacBot occupying a dusty square, the square contents will take the value vac. Note also that the VacBot does not perceive itself; the square contents for the square here is always either dust or empty.
- task(Identifier): The VacBot’s current task. The possible tasks are turn, move, and clean; or none if the VacBot is idle.
All of these percepts except for the task percept are only available when the VacBot is not moving, turning, or cleaning.
- The move actions will throw an ActException of type FAILURE if it is invoked while the VacBot is moving or cleaning. If the moving VacBot meets another VacBot, a permanent obstacle, or the edge of the grid, it halts and throws an ActException of type FAILURE. The exception message indicates whether the failure was temporary (caused by another VacBot) or permanent (caused by a fixed obstacle or the edge of the grid).
- The clean action will throw an ActException of type FAILURE if it is invoked while the VacBot is moving or cleaning.
- No environment management commands are supported. The environment runs until it is terminated by the user or by the operating system.
This environment was developed and provided by Rem Collier and Howell Jordan from UCD School of Computer Science and Informatics.