

![]()
![]()
Hermes-Studio is an open-source intuitive drag-and-drop interface to manage and remote control your Arduino-based robot in minutes. No programming skills required.
Written as a decoupled backend in Rust and frontend in Vue, the whole project serves as an advanced demonstration of the power of the Hermes-Five API for remote control of IoT boards.
I personally use this project to control my homemade InMoov robot.


To check out docs, visit Github Pages.
You can find pre-built releases for Windows, Linux, macOS and raspberryPiOS here. If you'd like to compile from source, you can follow the compilation guide.
Caution
All Arduino boards used in the project must be configured to use the StandardFirmataPlus.ino sketch.
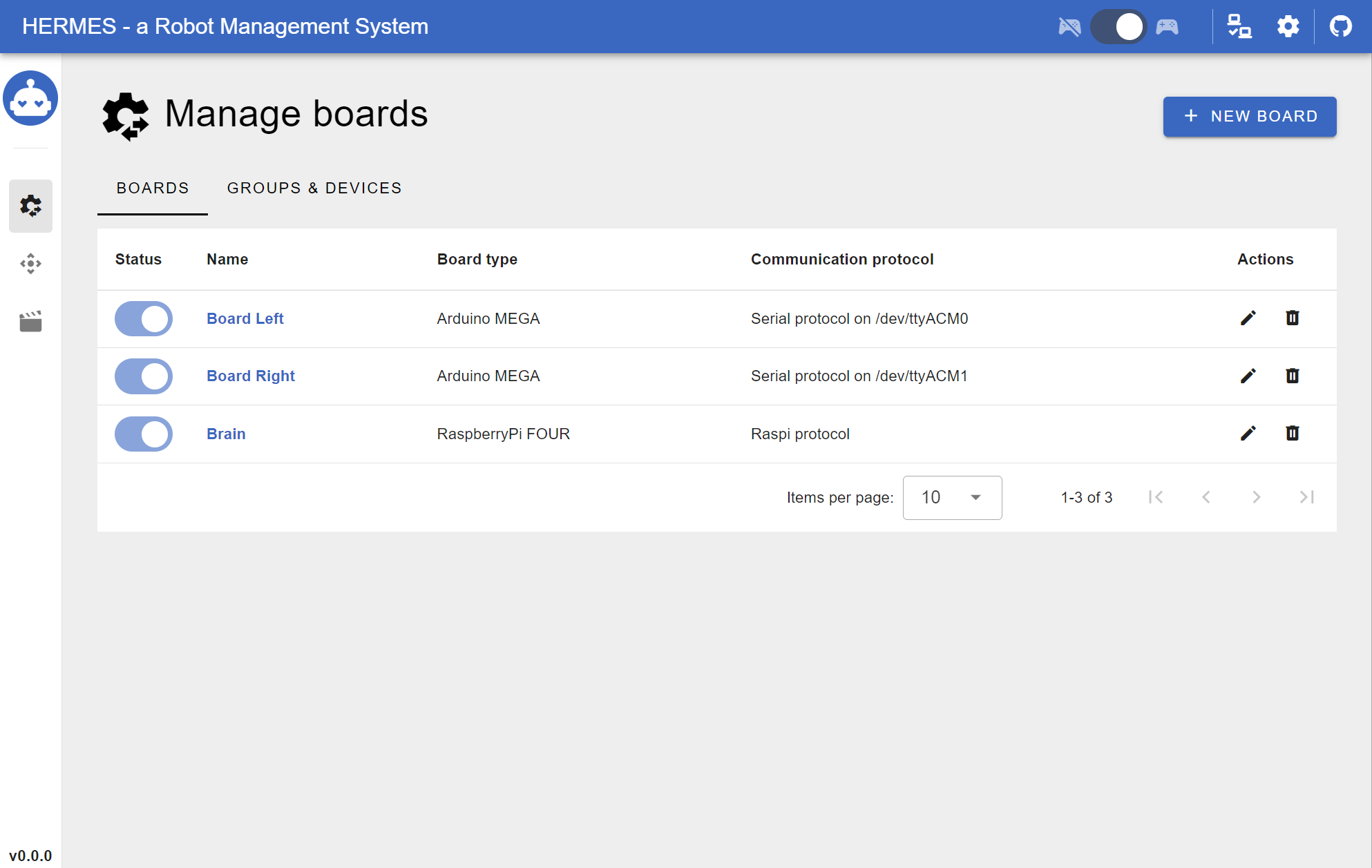
Hermes-Studio provides both an API (REST + WebSocket) and an Interface to remote control your Arduino (and other IoT compatible boards) using Hermes-Five under-the-hood.
- Configure your remote controllable boards (Arduino currently)
- Control boards over Serial connection
- Access remote control website from any device
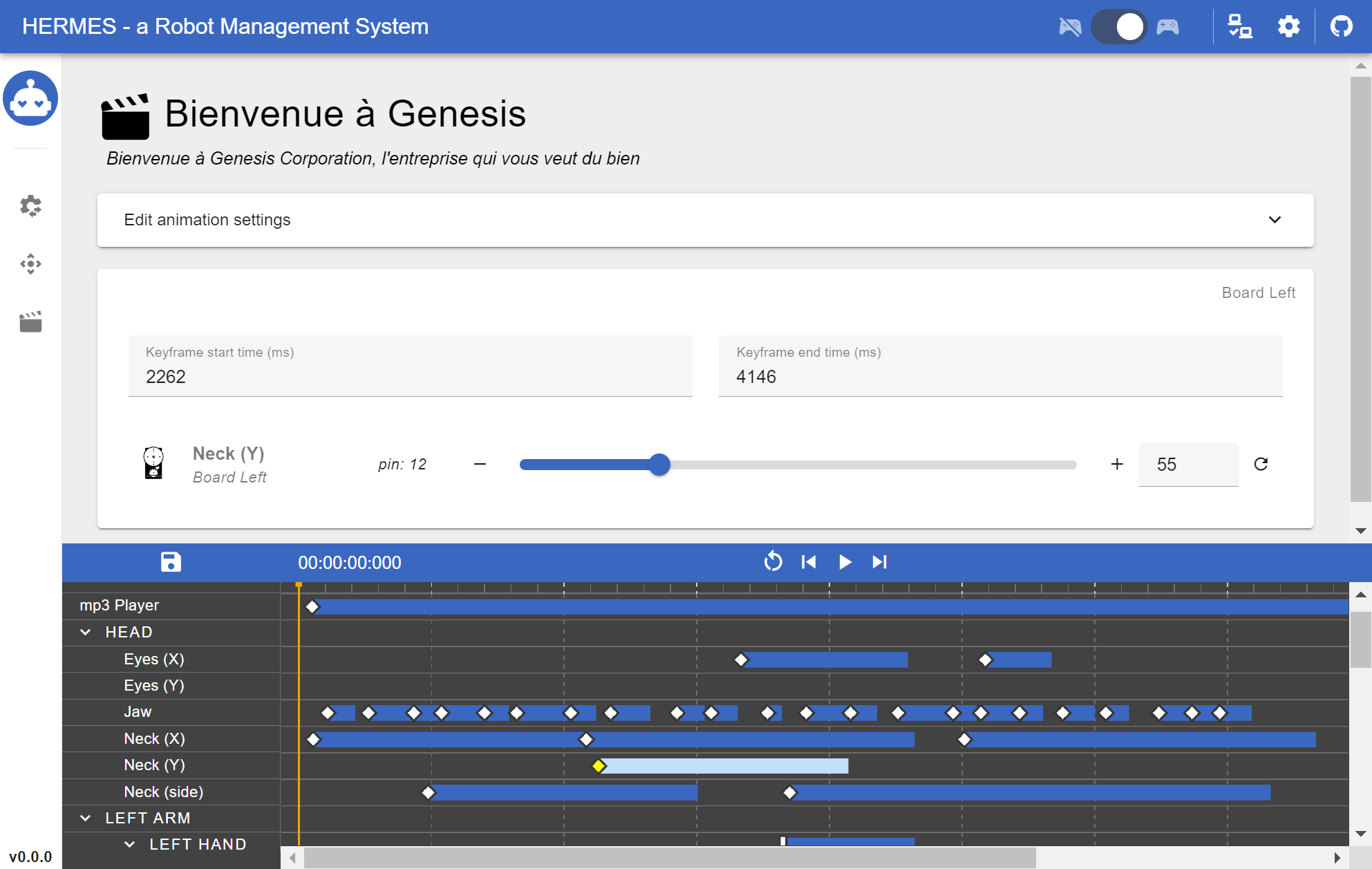
- Remote control all devices (LEDs, servos, etc.) individually
- Create and run states (static positions) of your robot
- Create and play animations from the timeline tool
All contributions are more than welcome through PR and the issue queue.
- Fork the repository
- Create a new branch:
git checkout -b feature-branch - Commit your changes:
git commit -am 'Add new feature' - Push to the branch:
git push origin feature-branch - Create a new Pull Request
The author does not claim to know everything about Rust programming or IoT, and all ideas are welcome as long as they respect the project's original philosophy.
This project is licensed under the MIT License. See the LICENSE file for details.
For support, please open an issue or reach out to the author.