This repository contains the open-sourced codes and hardware designs of the Swarm Robot (heroswarmv2) designed at the Heterogeneous Robotics Research Lab (HeRoLab) at the University of Georgia.



The robot is fully-capable in the following sense.
### Sensing: Multiple sensors such as proximity, RGB, sound, Inertial (IMU) altitude, and humidity and pressure measurements to capture local information;
### Communication: Explicit data communication modalities such as Wi-Fi and Bluetooth;
### Computing: High C1-level \cite{trenkwalder2019computational} computing through a Raspberry Pi Zero-based computing module that can support ROS and advanced programming;
### Motion: Multi-level motor control with onboard wheel odometry aided by a microcontroller;
### Power: Dedicated power management with different recharging variants such as inductive wireless charging or magnetic coupling.
A preprint of the paper focusing on the robot architecture is available at https://arxiv.org/abs/2211.03014
Cite the paper as "Starks M, Gupta A, Oruganti S, Parasuraman R. HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support. In Proceedings of 2023 IEEE/SICE International Symposium on System Integration (SII) 2023. IEEE." URL: https://ieeexplore.ieee.org/document/10039174
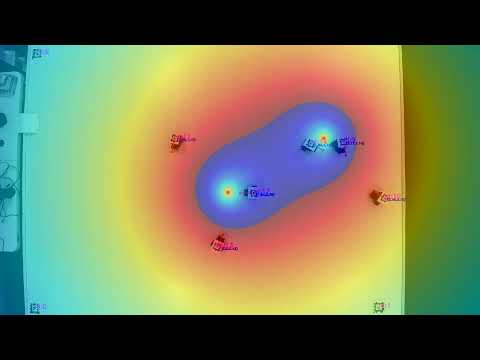
Running a Conventional Multi-Robot Rendezvous Algorithm with HeRoSwarmV2 robots. Here, the robots are meeting into one place in a distributed manner.

Running a Conventional Multi-Robot Formation Control Algorithm with HeRoSwarmV2 robots. Here, the robots are organizing into a square-like pattern with 9 robots.

More Demonstrations:



Go to the Wiki page for mode details.
-
Michael Starks - undergraduate student researcher at HeRoLab (https://github.com/MichaelStarks)
-
Aryan Gupta -- undergraduate student at Georgia Inst. of Technology (previously a high school intern at HeRoLab) (https://github.com/rtlaryan)
-
Sanjay Sarma O V -- College of Engineering, University of Georgia (https://github.com/sanjayovs)
-
PI: Prof. Ramviyas Parasuraman - HeRoLab UGA - (http://hero.uga.edu)
This project is a part of the HeRoSwarm project at the Heterogeneous Robotics Research Lab (HeRoLab) of the University of Georgia.
Please contact hero at uga . edu for any queries
