This code implements a package for General Laten Feature Model (GLFM) suitable for heterogeneous observations. The core code is in C++ and the package provides user interfaces in Python, Matlab and R. Moreover, several demos are provided to illustrate different applications, including missing data estimation and data exploratory analysis, of the GLFM.
To cite this work, please use
I. Valera, M. F. Pradier, M. Lomeli and Z. Ghahramani,
"General Latent Feature Model for Heterogeneous Datasets", 2017.
Available on ArXiv: https://arxiv.org/abs/1706.03779.
GLFM is a general Bayesian nonparametric latent feature model suitable for heterogeneous datasets, where the attributes describing each object can be either discrete, continuous or mixed variables. Specifically, it accounts for the following types of data:
• Continuous variables:
- Real-valued (encoded as 'g'): the attribute takes values in the real line.
- Positive real-valued ('p'): the attribute takes values in the real line.
• Discrete variables:
- Categorical data ('c'): the attribute takes a value in a finite unordered set, e.g., {‘blue’,‘red’, ‘black’}.
- Ordinal data ('o'): the attribute takes values in a finite ordered set, e.g., {‘never’, ‘often’, ‘always’}.
- Count data ('n'): the attribute takes values in the set {0,...,∞}.
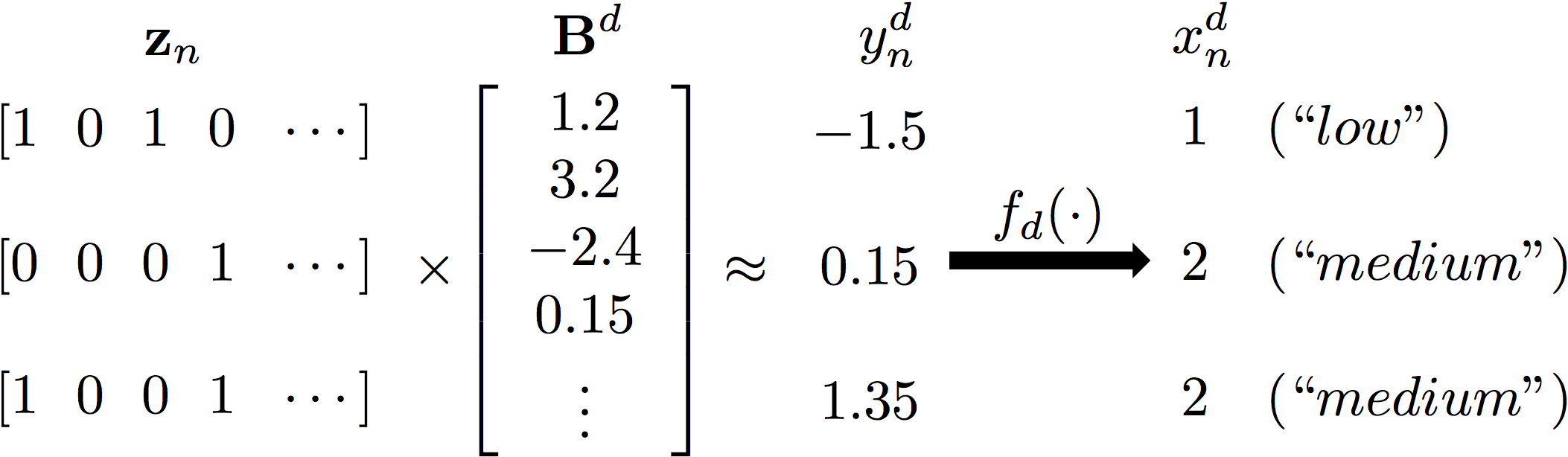
The GLFM builds on the Indian Buffet Process (Griffiths and Ghahramani, 2011), and therefore, it assumes that each observation x_n^d can be explained by a potentially infinite-length binary vector z_n whose elements indicate whether a latent feature is active or not for the n-th object; and a (real-valued) weighting vector B^d, whose elements weight the influence of each latent feature in the d-th attribute. Since the product of the latent feature vector and the weighting vector leads to a real-valued variable, it is necessary to map this variable to the desirable output (continuous or discrete) space, for example, the positive real line. Thus, the GLFM assumes the existence of intermediate Gaussian variables y_n^d, with mean z_nB^d and called pseudo-observation, and a transformation function f_d() that maps this variable into the actual observation x_n^d.
As an example, an ordinal attribute taking values in the ordered set {low, medium, high} can be represented using the GLFM as:
For more details on the GLMF, please refer to the research paper.
You can use GLFM from within Python, Matlab and R. Below we show an example of how to run the GLFM inference. For mode details on the functions and data structures, please refer to the GLFM documentation.
import GLFM
(hidden) = GLFM.infer(data)
where data is a structure containing:
X: NxD observation matrix of N samples and D dimensions
C: 1xD string array indicating type of data for each dimension
--- Alternative calls ---
import GLFM
hidden = GLFM.infer(data, hidden);
OR
import GLFM
hidden = GLFM.infer(data, hidden, params);
where hidden is a structure of latent variables:
Z: NxK binary matrix of feature assignments (initialization for the IBP)
and params is a structure containing all simulation parameters and model hyperparameters (see documentation for further details).
hidden = GLFM_infer(data);
where data is a structure containing:
X: NxD observation matrix of N samples and D dimensions
C: 1xD string array indicating type of data for each dimension
--- Alternative calls ---
hidden = GLFM_infer(data, hidden);
OR
hidden = GLFM_infer(data, hidden, params);
where hidden is a structure of latent variables:
Z: NxK binary matrix of feature assignments (initialization for the IBP)
and params is a structure containing all simulation parameters and model hyperparameters (see documentation for further details).
output <- GLFM_infer(data)
where data is a structure containing:
X: NxD observation matrix of N samples and D dimensions
C: 1xD string array indicating type of data for each dimension
and output is a list containing the lists hidden and params.
--- Alternative calls ---
output <- GLFM_infer(data,hidden)
OR
output = GLFM_infer(data, list(hidden, params));
where hidden is a list of latent variables:
Z: NxK binary matrix of feature assignments (initialization for the IBP)
and params is a list containing all simulation parameters and model hyperparameters (see documentation for further details). The output list contains the output lists hidden and params.
In general, the main requirements include a gcc compiler suitable for your OS and the GNU GSLlibrary. After you have downloaded GSL, open terminal and run ./configure, make and make install. If you are using Windows, your windows terminal might not recognise the ./configure, make, make install instructions because these are Linux command line tools. You can use MinGW, see the MinGW installation guide. In the MinGW shell run the ./configure, make, make install in the folder where you've downloaded the GSL library and it will recognise the instructions.
For Python:
- Python 2.7
- Anaconda (install at https://www.anaconda.com/download/)
- gcc compiler and qt functionality (these modules are normally already available)
If not, it can be installed in Ubuntu as:
sudo apt-get install build-essential
sudo apt-get install python-qt4
For Matlab:
- Matlab 2012b or higher
- GNU GSLlibrary
In UBUNTU: sudo apt-get install libgsl0ldbl or sudo apt-get install libgsl0-dev
- GMP library
In UBUNTU: sudo apt-get install libgmp3-dev
For R :
- R or Rstudio
- GNU GSL library (e.g. libgsl0-dev on Debian or Ubuntu, latest version of the GSL https://www.gnu.org/software/gsl/ )
- R packages: Rcpp, RcppGSL, matrixStats, ggplot2, R.matlab
In order to run GLFM on your data, you need to:
-
Download the latest git repository (command: "git clone https://github.com/ivaleraM/GLFM.git")
-
Compile the C++ code as
-
For PYTHON (in a terminal, go to folder "GLFM/install/" and execute): bash install_for_python.sh
-
For MATLAB (in Matlab workspace):
- Add path "GLFM/src/Ccode" and its children directories to Matlab workspace
- From matlab command window, execute command: mex -lgsl -lgmp -lgslcblas IBPsampler.cpp
-For R:
- First make sure R internally recognises the GSL package you previously installed, in R: install.packages('gsl',type = source) - Go to the cloned repo "~/GLFM/src" and unzip RcppGSLExample.zip - In terminal run: R build RcppGSLExample (this will create a .tar.gz file, called RcppGSLExample+_$VERSION+tar.gz, replace $VERSION with the name of your file) - In terminal run: R install RcppGSLExample+_$VERSION+tar.gz - Open R and load the package: library("RcppGSLExample") -
-
Check the success of the installations by running the script 'demo_GLFM_test' available for Python, Matlab and R in the 'demos' folder.
The folder `demos' contain scripts, as well as Jupiter notebooks, with application examples of the GLFM, including missing data estimation (a.k.a. matrix completion) and data exploratory analysis.
As an example, the script `demo_toyImages' replicates the example of the IBP linear-Gaussian model in (Griffiths and Ghahramani, 2011) by generating a small set of images composed by different combinations of four original images plus additive Gaussian noise. Using the GLFM, we are able to recover the original images seamlessly.
Other examples include demo_matrix_completion_MNIST, demo_data_exploration_counties, and demo_data_exploration_prostate, available for PYTHON, Matlab and R. For more detail, please visit our demo website.
The Python and Matlab implementations are under MIT license. The R implementation extends the RcppGSLExample, and therefore, is under GPL (>= 2) license.
For further information or contact:
Isabel Valera: isabel.valera.martinez (at) gmail.com
Melanie F. Pradier: melanie.fpradier (at) gmail.com
Maria Lomeli: maria.lomeli (at) eng.cam.ac.uk