- 목표
- 사전준비
- 실습
- 데모 설명
- tf2 tools
- rviz와 tf2
- turtlesim을 활용한 multi-robot 예제에서 tf2 기능 살펴보기.
demo package와 dependencies 설치.
sudo apt-get install ros-humble-turtle-tf2-py ros-humble-tf2-tools ros-humble-tf-transformations새로운 터미널을 실행한 후, ROS2 설치를 source하고 다음 명령어를 실행한다.
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
위 사진과 같이 두 개의 turtle이 실행되는 것을 볼 수 있다. 새로운 터미널을 실행한 후 다음 명령어를 실행한다.
ros2 run turtlesim turtle_teleop_key
위 사진처럼, 키보드를 이용해 하나의 turtle을 움직여보면, 또 다른 turtle이 따라오는 것을 확인 할 수 있다.
- 배경 지식
-
Frame: 로봇의 위치/방향을 측정하는 기준 (xy 좌표계, xyz 좌표계)
이미지 출처: https://foxglove.dev/blog/understanding-ros-transforms
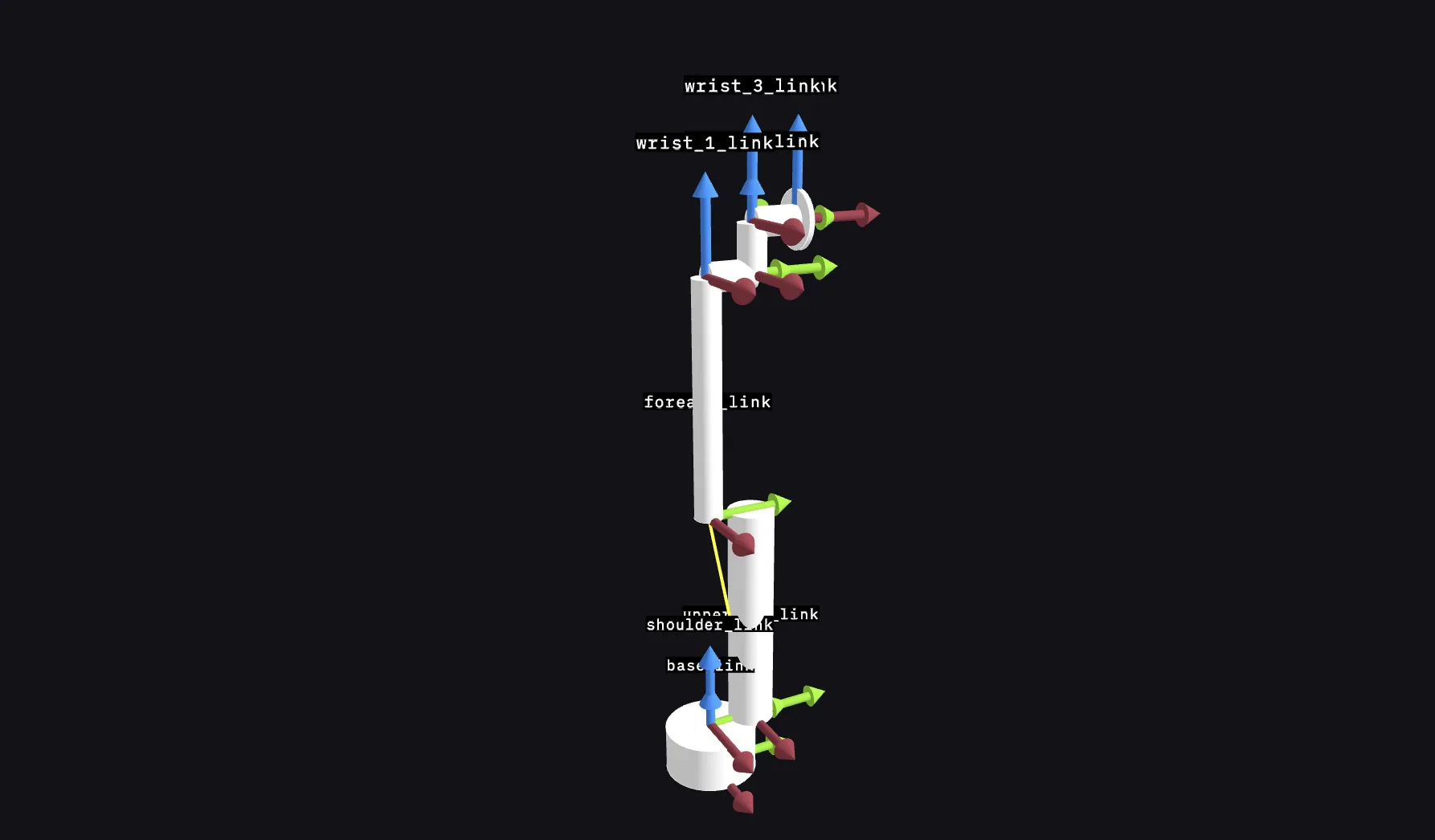
- Red arrow (X축) / Red arrow (Y축) / Green arrow (Z축) *
- 기준점과 좌표축을 어디에 두느냐에 따라 무수히 많은 frame이 존재한다
- World frame (or map frame): 공간 좌표계 (3인칭 시점)
- Robot frame (base_link): 로봇의 위치를 기준으로 하는 좌표계
- "turtle1" frame: turtle1의 입장에서 바라본 좌표계
- "turtle2" frame: turtle2의 입장에서 바라본 좌표계
- ...
- Sensor frame: 로봇에 부착된 센서를 기준으로 하는 좌표계
- ...
- 서로 다른 frame 사이에는 연관성이 있다
- World frame은 모든 frame의 상위 프레임이다
- Robot frame은 해당 로봇에 부착된 Sensor frame의 부모 frame이다
- "turtle1" frame과 "turtle2" frame은 둘 다 world frame의 자식 framd이다
- Turtle2가 Turtle1을 따라가려면?
- Turtle1의 위치를 Turtle2 기준으로 바꿔서 표현해야 한다
- Src frame: "world" frame or "turtle1" frame
- Dest frame: "turtle2" frame
- Turtle1의 위치를 Turtle2 기준으로 바꿔서 표현해야 한다
-
Transform: 한 frame을 기준이 되는 다른 frame (reference frame)으로 표현하는 것
- ex) 로봇팔에 부착된 manipulator의 위치를 world frame 상의 좌표로 표현할 수 있다
-
tf2: ROS2에서 frame 간 변환 기능을 제공하는 라이브러리
-
- ROS graph 구조

- tf2 library는 3개의 프레임(world, turtle1, turtle2)을 생성한다.
- tf2 broadcaster("/broadcaster1", "/broadcaster2")는 turtle들의 프레임을 publish한다.
- tf2 listener ("/listener")는 두 프레임 사이의 차이를 계산하고, 하나의 turtle을 움직여 다른 turtle을 따라가도록 한다.

tf2_tools을 활용하여 tf2가 이 데모에서 어떻게 사용되고 있는지 살펴보자.
view_frames는 tf2가 broadcast하고 있는 프레임들의 다이어그램을 생성한다.
ros2 run tf2_tools view_frames위 명령을 실행하면 아래와 같은 출력을 볼 수 있다.
Listening to tf data during 5 seconds...
Generating graph in frames.pdf file...
tf2 listener는 broadcast되고 있는 프레임들을 listen하여, 프레임들이 어떻게 연결되어 있는지를 tree로 표현해 준다. 생성된 frame.pdf를 실행하면 아래와 같은 tree를 볼 수 있다.

위 tree에서, tf2가 broadcast하고 있는 world/turtle1/turtle2 프레임들을 확인 할 수 있다. 여기서 world프레임은 turtle1과 turtle2의 부모 프레임이다. 또한, 최초 및 최신 transform이나 publish 주기와 같은 디버깅용 정보도 함께 표시해 준다.
tf2_echo는 broadcast되고 있는 임의의 두 프레임간의 transform을 출력해 준다.
사용 방법:
ros2 run tf2_ros tf2_echo [reference_frame] [target_frame]현재 터미널에서 아래 명령어를 실행하자
ros2 run tf2_ros tf2_echo turtle2 turtle1명령어를 실행하면 아래와 같이 출력된 transform을 확인할 수 있다. (기준 프레임: turtle2, 대상 프레임: turtle1)
At time 1670314455.630744254
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.247, 0.969]
- Rotation: in RPY (radian) [0.000, -0.000, 0.499]
- Rotation: in RPY (degree) [0.000, -0.000, 28.599]
- Matrix:
0.878 -0.479 0.000 0.000
0.479 0.878 0.000 0.000
0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000
키보드로 turtle을 조종하여, transform이 변화하는지 확인해보자.
rviz는 tf2 프레임들을 테스트할때 유용한 시각화 툴이다. rviz를 이용하여 turtle 프레임을 확인해보자. 아래 명령과 같이 -d 옵션으로 turtle_rviz.rviz 설정파일이 적용된 rviz를 실행해보자.
ros2 run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
왼쪽 Displays 패널의 TF-frames 항목을 보면, tf2에 의해 broadcast되고 있는 프레임들을 확인해 볼 수 있다. 또한 키보드로 turtle을 움직이면, rviz상에서 프레임들이 따라 움직이는 모습을 볼 수 있다.