Provide firmware to create a VINS sensor using an APM2.5 and a pointgrey camera. The package contains apm firmware to read IMU data and trigger camera synchronously.
This package depends on the following packages:
- pointgrey_camera_driver (Download from here. Also if necessary, checkout the specific SHA used)
- rosserial_node
- rosserial_python
Once the dependencies have been installed, follow these steps
- Build the package using
catkin build - Copy the
camera_imu_firmwaresketch to your arduino sketchbook - Rebuild ros messages in your libraries so as to include the messages from this package ( Follow this tutorial)
- Flash the firmware to Arduino.
Connect GPIO0 to A0 pin on APM2.5. Also connect ground of camera to ground.
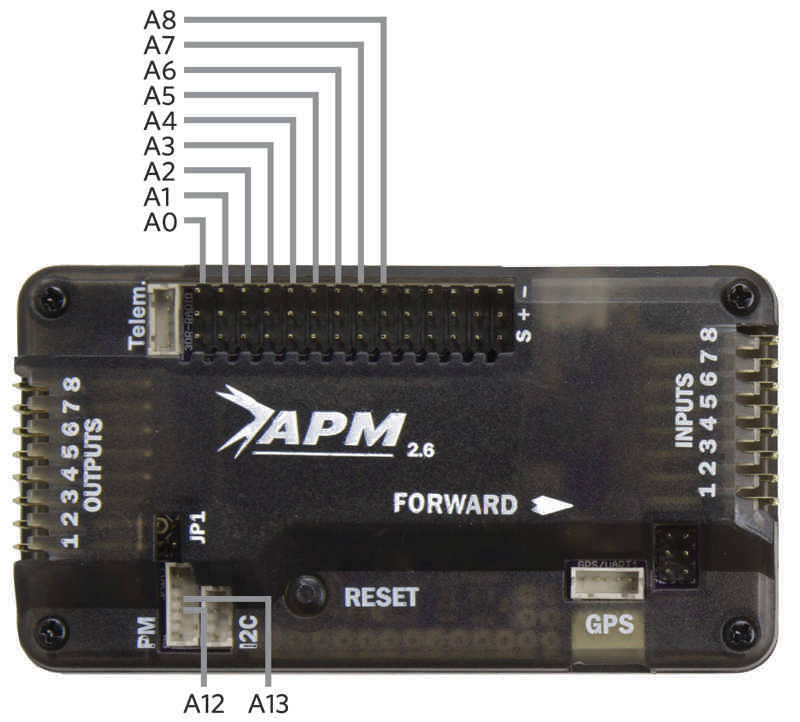
(Picture credit: http://ardupilot.org/copter/docs/common-apm25-and-26-overview.html)
Connect the APM board and the camera to the computer. Then run the launch file provided:
roslaunch camera_imu_sync_apm imu_camera_combined.launch
Sometimes the camera does not respond when the launch file is started. The known workaround for now is to start reconfigure, and disable and re-enable external_trigger. This only happens occasionally so not sure what the reason is.