{kind=link}
{kind=link}
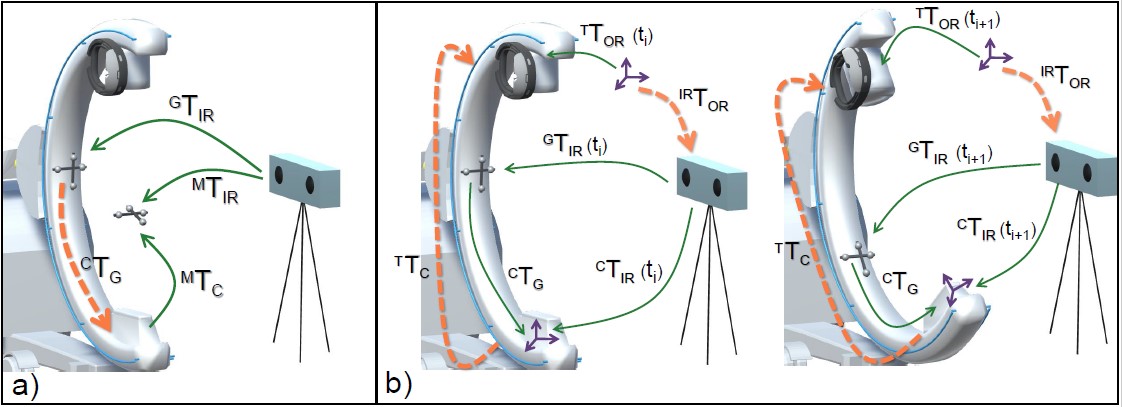
Calibration between C-arm's X-ray source and the visual tracker that is attached to the C-arm. The calibration process has 2 steps in total.
Calibration between X-ray source and the marker that is attached to the C-arm. After this step, we can get the X-ray source's pose in NDI tracker's coordinate frame.
Hand-Eye calibration between X-ray-source and HoloLens.
- Python 3
- Matlab
- Jupyter Notebook
- OpenCV
- Numpy
- Scipy
- Matplotlib
This code was tested on Windows 10.
- Run the jupyter notebook file
System_Calibration.ipynband follow the instructions. - Run the Matlab script
HandEyeCalibration.m.
If you use this code for your research, please cite our paper Development and Pre-Clinical Analysis of Spatiotemporal-Aware Augmented Reality in Orthopedic Interventions:
@ARTICLE{9252943,
author={Fotouhi, Javad and Mehrfard, Arian and Song, Tianyu and Johnson, Alex and Osgood, Greg and Unberath, Mathias and Armand, Mehran and Navab, Nassir},
journal={IEEE Transactions on Medical Imaging},
title={Development and Pre-Clinical Analysis of Spatiotemporal-Aware Augmented Reality in Orthopedic Interventions},
year={2021},
volume={40},
number={2},
pages={765-778},
doi={10.1109/TMI.2020.3037013}}
Interactive Flying Frustums (IFFs): spatially aware surgical data visualization:
@article{fotouhi2019interactive,
title={Interactive Flying Frustums (IFFs): spatially aware surgical data visualization},
author={Fotouhi, Javad and Unberath, Mathias and Song, Tianyu and Gu, Wenhao and Johnson, Alex and Osgood, Greg and Armand, Mehran and Navab, Nassir},
journal={International journal of computer assisted radiology and surgery},
volume={14},
number={6},
pages={913--922},
year={2019},
publisher={Springer}
}
and Co-localized augmented human and X-ray observers in collaborative surgical ecosystem:
@article{fotouhi2019co,
title={Co-localized augmented human and X-ray observers in collaborative surgical ecosystem},
author={Fotouhi, Javad and Unberath, Mathias and Song, Tianyu and Hajek, Jonas and Lee, Sing Chun and Bier, Bastian and Maier, Andreas and Osgood, Greg and Armand, Mehran and Navab, Nassir},
journal={International journal of computer assisted radiology and surgery},
volume={14},
number={9},
pages={1553--1563},
year={2019},
publisher={Springer}
}