Multiple ultrasonic sensors HC-SR04 example
Video: https://youtu.be/Jmjtri25QWo

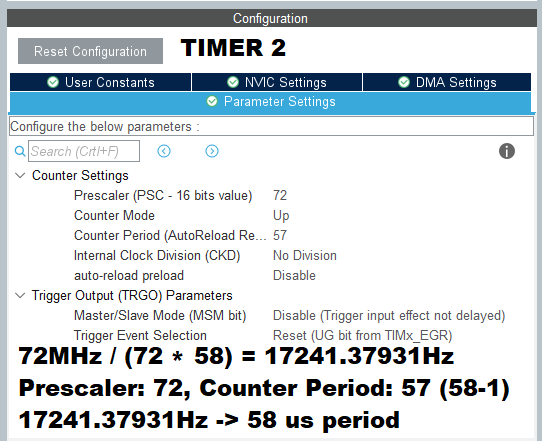
Speed of sound at 22 °C is 344 m/s.
Sound travels 1 cm one way in just 29 us. Calculation: 0.01m / 344m/s = 29 us.
But the sound travels from the sensor, hits the obstacle and goes back, therefore each centimeter takes twice that much 29 us * 2 = 58us.
main.c
/* USER CODE BEGIN 2 */
HAL_Delay(500);
HAL_GPIO_WritePin(USB_Enable_GPIO_Port, USB_Enable_Pin, GPIO_PIN_SET);
char message[200], number[8];
uint16_t distancesInCm[3];
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(900);
CDC_Transmit_FS((uint8_t*)&"\n\n\nMeasuring Distances...\n", strlen("\n\n\nMeasuring Distances...\n"));
HAL_Delay(100);
memset(message, 0, 200);
for(uint16_t i=0; i<3; i++)
{
sensor = i;//update sensor index in timer2
distancesInCm[i] = measureDistance(triggerPorts[i], triggerPins[i], echoPorts[i], echoPins[i]);
memset(number, 0, 8);
itoa(distancesInCm[i], number, 10);
strcat(message, number);
strcat(message, " cm\n");
}
CDC_Transmit_FS((uint8_t*)&message, strlen(message));
}
/* USER CODE END 3 */myLibrary.h
#ifndef INC_MYLIBRARY_H_
#define INC_MYLIBRARY_H_
#include "main.h"
#include "usb_device.h"
#include "usbd_cdc_if.h"
extern TIM_HandleTypeDef htim2;
#define TriggerDuration 2
uint16_t distance, triggerTime, sensor;
GPIO_TypeDef *triggerPorts[3];
uint16_t triggerPins[3];
GPIO_TypeDef *echoPorts[3];
uint16_t echoPins[3];
void SysTickEnable();
void SysTickDisable();
uint16_t measureDistance(GPIO_TypeDef *triggerPort, uint16_t triggerPin, GPIO_TypeDef *echoPort, uint16_t echoPin);
#endif /* INC_MYLIBRARY_H_ */myLibrary.c
#include "myLibrary.h"
uint16_t distance = 0, triggerTime = 0, sensor = 0;
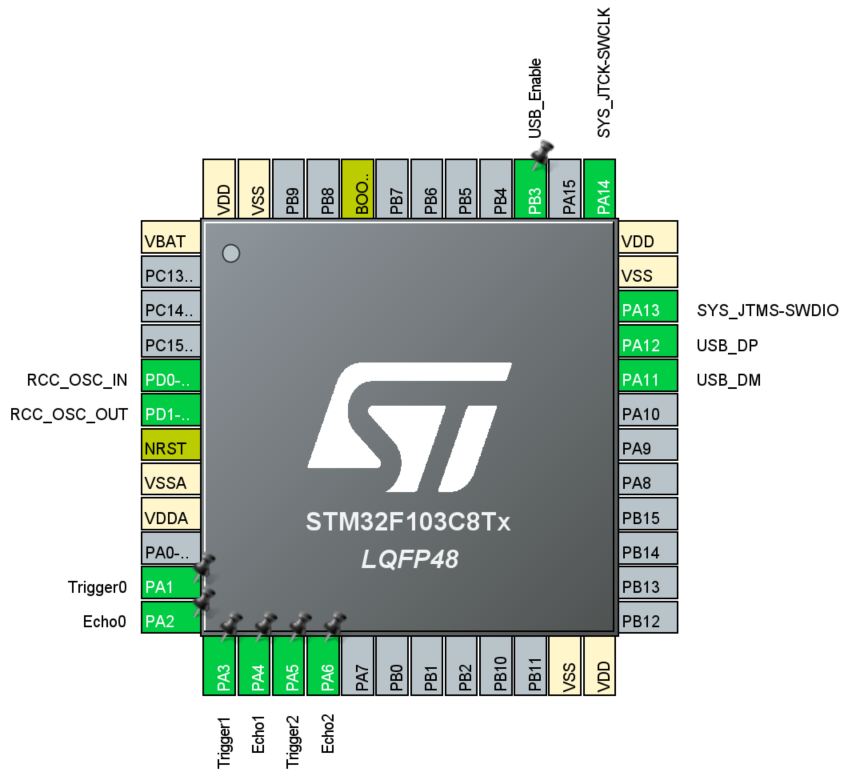
GPIO_TypeDef *triggerPorts[3] = {Trigger0_GPIO_Port, Trigger1_GPIO_Port, Trigger2_GPIO_Port};
uint16_t triggerPins[3] = {Trigger0_Pin, Trigger1_Pin, Trigger2_Pin};
GPIO_TypeDef *echoPorts[3] = {Echo0_GPIO_Port, Echo1_GPIO_Port, Echo2_GPIO_Port};
uint16_t echoPins[3] = {Echo0_Pin, Echo1_Pin, Echo2_Pin};
void SysTickEnable()
{
__disable_irq();
SysTick->CTRL |= (SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_ENABLE_Msk);
__enable_irq();
}
void SysTickDisable()
{
__disable_irq();
SysTick->CTRL &= ~(SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_ENABLE_Msk);
__enable_irq();
}
uint16_t measureDistance(GPIO_TypeDef *triggerPort, uint16_t triggerPin, GPIO_TypeDef *echoPort, uint16_t echoPin)
{
if(!HAL_GPIO_ReadPin(echoPort, echoPin))//skip sensor if ECHO pin is still busy
{
SysTickDisable();
HAL_TIM_Base_Start_IT(&htim2);
HAL_GPIO_WritePin(triggerPort, triggerPin, GPIO_PIN_SET);
triggerTime = 0;//reset the variable
asm ("nop");//to avoid program freezing
while(triggerTime < TriggerDuration);
HAL_GPIO_WritePin(triggerPort, triggerPin, GPIO_PIN_RESET);
while(!HAL_GPIO_ReadPin(echoPort, echoPin));
distance = 0;//reset the variable
while(HAL_GPIO_ReadPin(echoPort, echoPin));
HAL_TIM_Base_Stop_IT(&htim2);
SysTickEnable();
}else//give max distance if ECHO pin is still busy
{
distance = 500;
}
return distance;
}stm32f1xx_it.c
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
if(HAL_GPIO_ReadPin(echoPorts[sensor], echoPins[sensor]) && distance < 500)
distance++;
if(triggerTime < TriggerDuration)
triggerTime++;
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}