px4_fmu_v5x uavcan Unable to start self startup #19463
Comments
|
This problem occurs on boards that do not use px4io |
|
I don't know if px4io will appear again after it is enabled |
|
Do you have an SD card in? |
|
SD card, of course |
|
Manual start cannot be started, and the uavcan start command must be run twice in a row |
I'm not sure what you mean, can you share the full output? Which version of PX4 is this? |
|
master branch |
|
HW arch: PX4_FMU_V5X ERROR [mixer] failed to load mixer NuttShell (NSH) NuttX-10.2.0 |
|
The full log is here:https://logs.px4.io/plot_app?log=87e7b778-eb3e-4e59-a394-5fa088be64d1 |
|
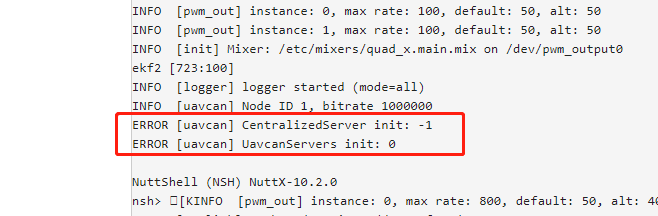
UAVCAN_ENABLE, 2 but uavcan not started
|

hi,dagar The problem has been solved!! |
|
However, this problem should be solved. There is only one can interface on the unofficial IO board, which leads to initialization failure |
|
In addition, the SD card must be replaced before it can be started normally. The original SD card cannot start the service |
Describe the bug
param uavcan_Enable has been set to 3, but the uavcan service will not start automatically
To Reproduce
Steps to reproduce the behavior:
Expected behavior
Prompt that the uavcan fails to start. Use the mavlink console command:
uavcan statusLog Files and Screenshots
The text was updated successfully, but these errors were encountered: