Attacking End-to-End Autonomous Driving
[ Talk ] [ Video ] [ Code ] [ Paper ]
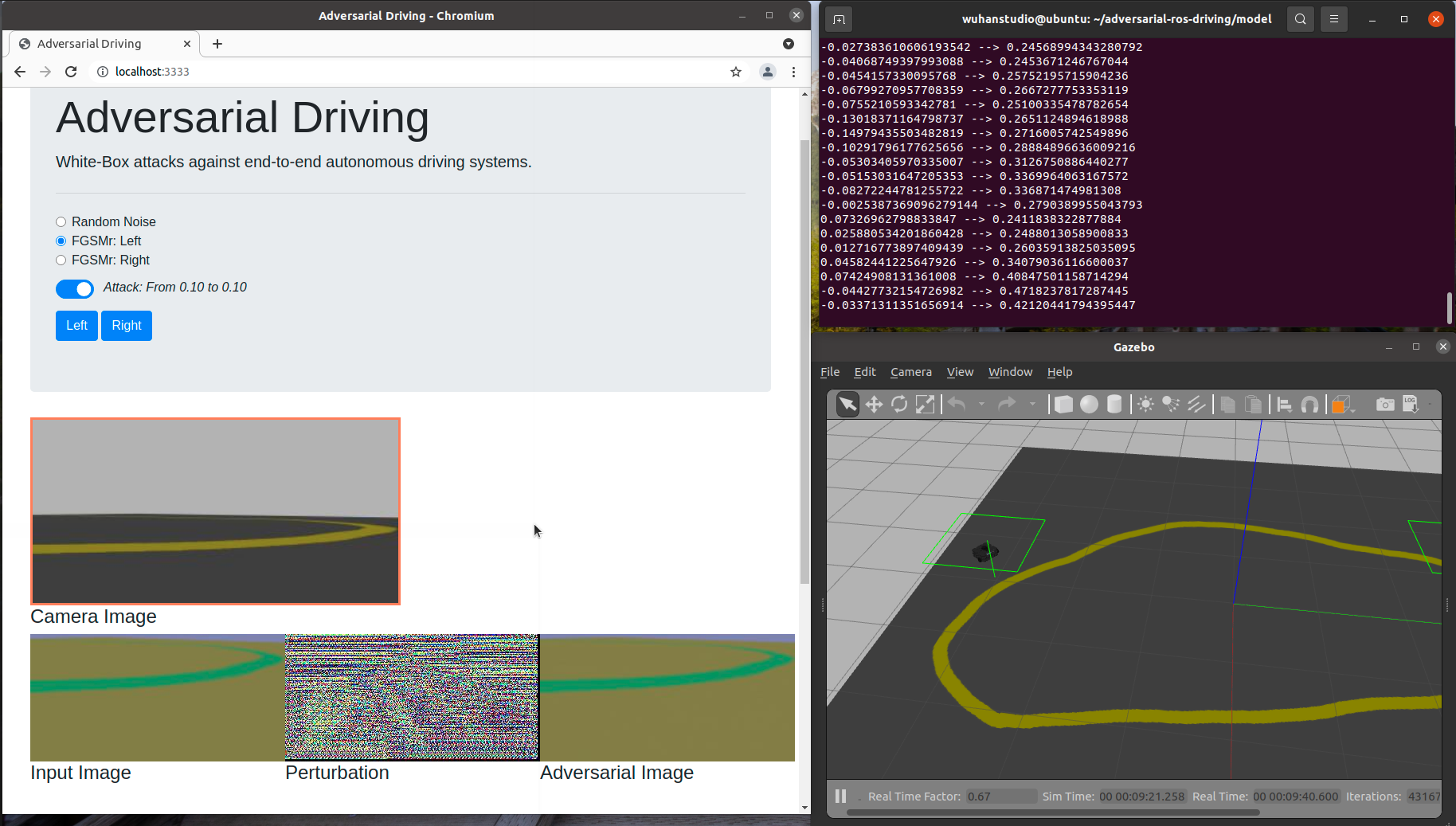
The behaviour of end-to-end autonomous driving model can be manipulated by adding unperceivable perturbations to the input image.

You may use anaconda or miniconda.
$ git clone https://github.com/wuhanstudio/adversarial-driving
$ cd adversarial-driving/model
$ # CPU
$ conda env create -f environment.yml
$ conda activate adversarial-driving
$ # GPU
$ conda env create -f environment_gpu.yml
$ conda activate adversarial-gpu-driving
$ python drive.py model.h5This simulator was built for Udacity's Self-Driving Car Nanodegree, and it's available here (Download the zip file, extract it and run the executable file).
$ cd adversarial-driving/simulator/
$ ./Default\ Linux\ desktop\ Universal.x86_64
Version 1, 12/09/16
Linux Mac Windows 32 Windows 64
Your can use any web server, just serve all the content under client/web.
If you use windows, click on client/client.exe. It's a single executable that packages everything.
For Linux and Mac, or other Unix, the server can be built with:
$ cd adversarial-driving/client
$ go install github.com/gobuffalo/packr/v2@v2.8.3
$ go build
$ ./client
The web page is available at: http://localhost:3333/
We also tested our attacks in ROS Gazebo simulator.
https://github.com/wuhanstudio/adversarial-ros-driving
@INPROCEEDINGS{han2023driving,
author={Wu, Han and Yunas, Syed and Rowlands, Sareh and Ruan, Wenjie and Wahlström, Johan},
booktitle={2023 IEEE Intelligent Vehicles Symposium (IV)},
title={Adversarial Driving: Attacking End-to-End Autonomous Driving},
year={2023},
volume={},
number={},
pages={1-7},
doi={10.1109/IV55152.2023.10186386}
}