Attacking End-to-End Autonomous Driving Systems
[ Talk ] [ Video ] [ Code ] [ Paper ]
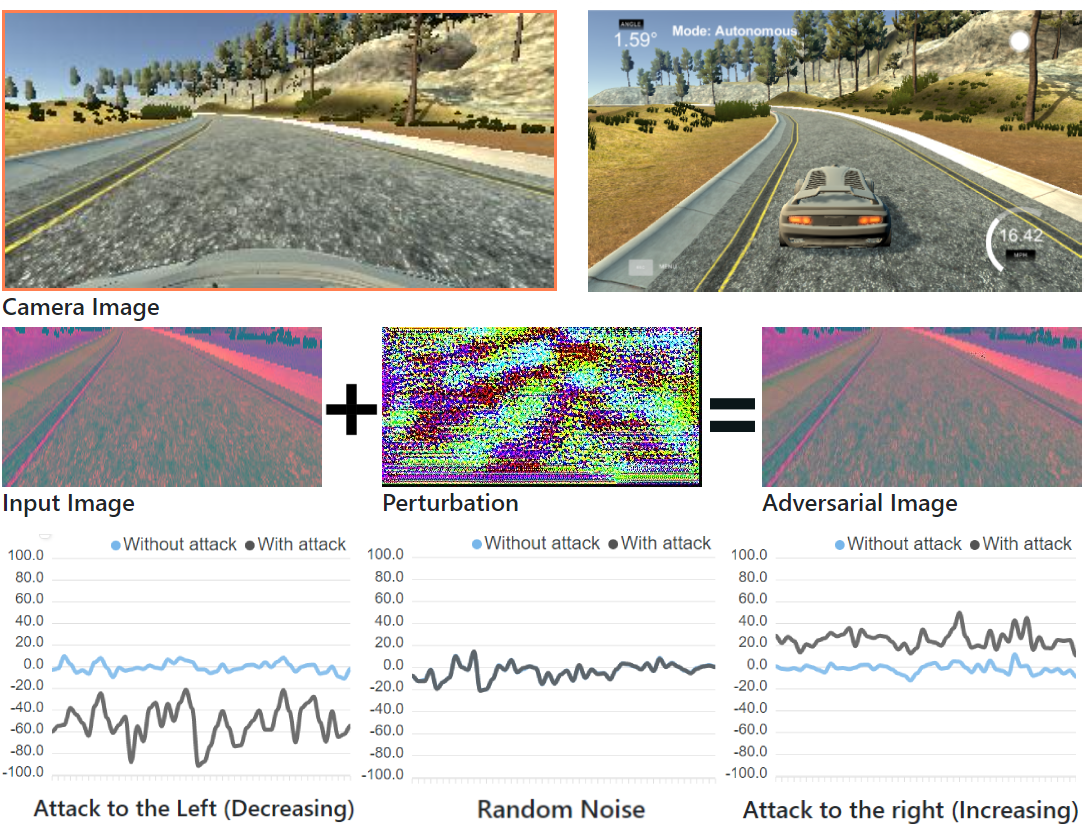
The behaviour of end-to-end autonomous driving model can be manipulated by adding unperceivable perturbations to the input image.

$ sudo apt install ros-noetic-desktop-full
$ sudo apt install ros-noetic-rosbridge-suite ros-noetic-turtlebot3-simulations ros-noetic-turtlebot3-gazebo ros-noetic-teleop-twist-keyboard
$ git clone https://github.com/wuhanstudio/adversarial-ros-driving
$ cd adversarial-ros-driving
$ git clone https://github.com/wuhanstudio/adversarial-driving
$ cd adversarial-driving
$ cd ros_ws
$ rosdep install --from-paths src --ignore-src -r -y
$ catkin_make
$ source devel/setup.sh
$ export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_lane turtlebot3_lane.launch
# You may need to put the turtlebot on track first
# roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
$ cd model/
$ # CPU
$ conda env create -f environment.yml
$ conda activate adversarial-driving
$ # GPU
$ conda env create -f environment_gpu.yml
$ conda activate adversarial-gpu-driving
$ # If you use anaconda as your defaut python3 environment
$ pip3 install catkin_pkg empy defusedxml numpy twisted autobahn tornado pymongo pillow service_identity
$ roslaunch rosbridge_server rosbridge_websocket.launch
# For real turtlebot3
$ python3 drive.py --env turtlebot --model model_turtlebot.h5
# For Gazebo Simulator
$ python3 drive.py --env gazebo --model model_gazebo.h5
The web page will be available at: http://localhost:8080/

That's it!
The following script collects image data from the topic /camera/rgb/image_raw and corresponding control command in /cmd_vel. The log file is saved in driving_log.csv, and images are saved in IMG/ folder
$ cd model/data
$ # Collect left camera data
$ python3 line_follow.py --camera left --env gazebo
$ python3 ros_collect_data.py --camera left --env gazebo
$ # Collect center camera data
$ python3 line_follow.py --camera center --env gazebo
$ python3 ros_collect_data.py --camera center --env gazebo
$ # Collect right camera data
$ python3 line_follow.py --camera right --env gazebo
$ python3 ros_collect_data.py --camera right --env gazebo
Once the data is collected, we can train a model that tracks the lane.
$ cd model
$ python3 model.py
We also tested our attacks in Udacity autonomous driving simulator.
https://github.com/wuhanstudio/adversarial-driving
@INPROCEEDINGS{han2023driving,
author={Wu, Han and Yunas, Syed and Rowlands, Sareh and Ruan, Wenjie and Wahlström, Johan},
booktitle={2023 IEEE Intelligent Vehicles Symposium (IV)},
title={Adversarial Driving: Attacking End-to-End Autonomous Driving},
year={2023},
volume={},
number={},
pages={1-7},
doi={10.1109/IV55152.2023.10186386}
}